This website will no longer be updated, please refer to the new website!
*Corresponding Author
Drivers with disabilities such as hemiplegia or unilateral upper limb amputation restricting steering wheel operation to one arm could encounter the challenge of stabilizing vehicles during pedestrian collision avoidance. An sEMG-controlled steering assistance system was developed for these drivers to enable rapid steering wheel rotation with only one healthy arm. Test drivers were recruited to use the Myo armband as a sEMG-based interface to perform pedestrian collision avoidance in a driving simulator. It was hypothesized that the sEMG-based interface would be comparable or superior in vehicle stability to manual takeover from automated driving and conventional steering wheel operation. The Myo armband interface was significantly superior to manual takeover from automated driving and comparable to manual steering wheel operation. The results of the driving simulator trials confirm the feasibility of the sEMG-controlled system as a safe alternative that could benefit drivers with the aforesaid disabilities.
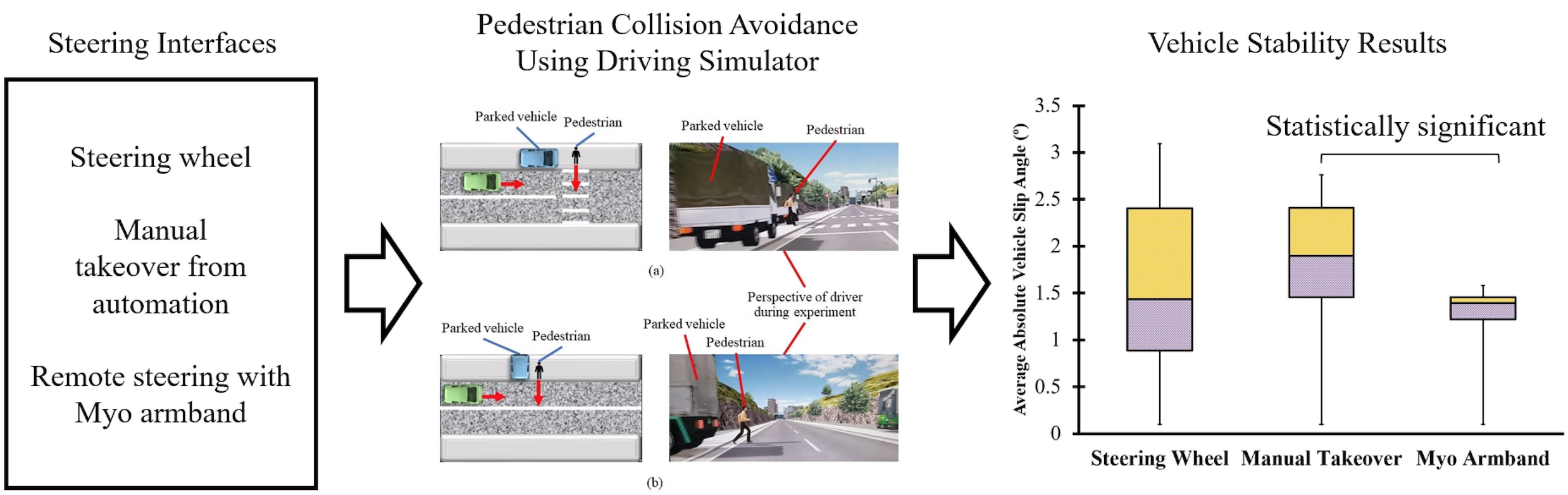
Edric John Cruz Nacpil, Zheng Wang*, Zhanhong Yan, Tsutomu Kaizuka, and Kimihiko Nakano, “Surface Electromyography-Controlled Pedestrian Collision Avoidance: A Driving Simulator Study“ IEEE Sensors Journal, vol. 21, no. 12, pp. 13877-13885, Jun. 2021. DOI: 10.1109/JSEN.2021.3070597
This paper focuses on designing adaptive shared steering control via forearm sEMG measurement and evaluating its effect on driving performance and driver workload during a double lane change task. A driving simulator experiment was conducted, and the driving conditions were Manual, HG-Strong, HG-Normal, HG-Decrease, and HG-Increase. The results show that the driver behavior, in terms of steering behavior, lane departure risk, and driver workload, was different between driving with adaptive authority haptic guidance and with fixed authority haptic guidance. A reduction in both lane departure risk and driver workload was found in the condition of HG-Decrease compared to manual driving and fixed authority haptic guidance. This outcome suggests the potential of the adaptive authority of HG-Decrease to improve driver-automation cooperation for a steering task.
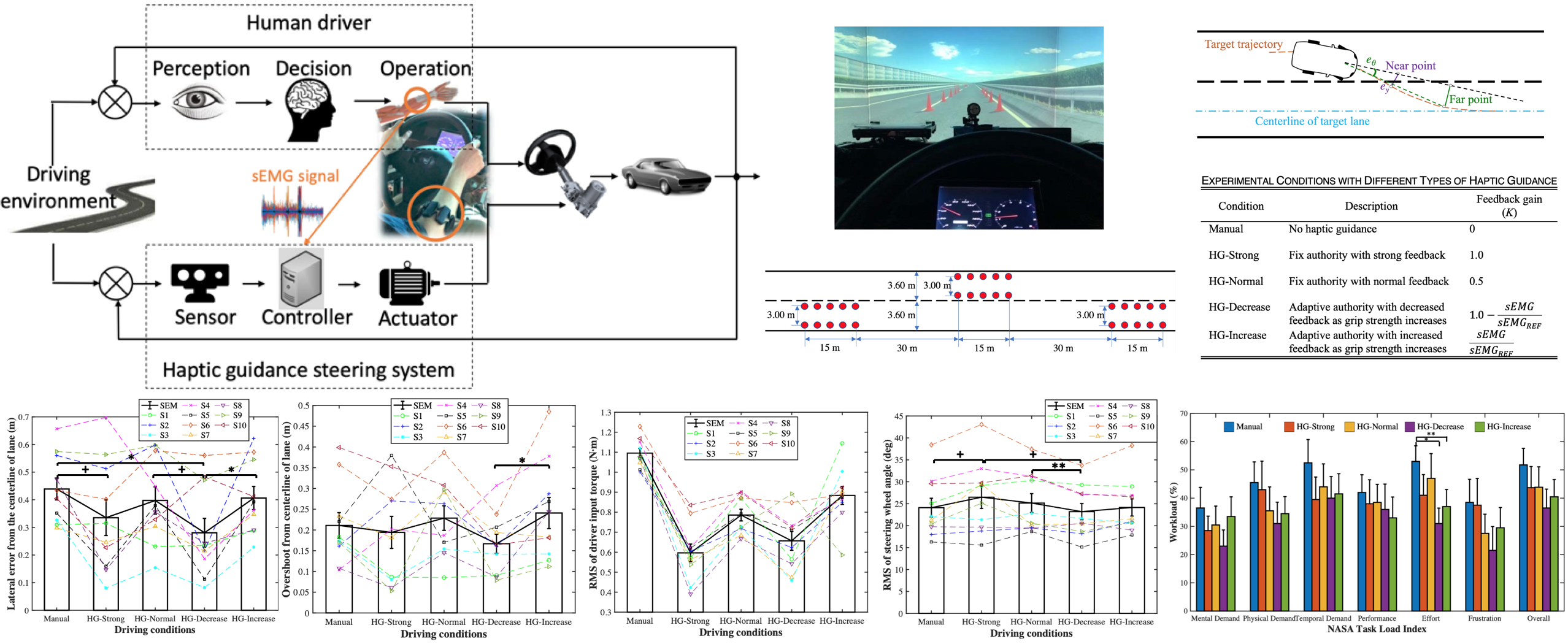
Zheng Wang*, Satoshi Suga, Zhanhong Yan, Edric John Cruz Nacpil, and Kimihiko Nakano, “Adaptive shared steering control system via forearm surface electromyography measurement“ IEEE Sensors Journal, vol. 21, no. 4, pp. 5444-5453, Feb. 2021. DOI: 10.1109/JSEN.2020.3035169
Compared with continuous haptic guidance with constant gain and threshold-based haptic guidance, haptic guidance via reinforcement learning has better performance on reducing steering control activity while remaining a high lane keeping accuracy compared to . Furthermore, the proposed system shows its capability of being adaptive to individualized drivers. This paper suggests the potential of using deep reinforcement learning to design haptic guidance steering system for improving individualized driver safety and comfort.
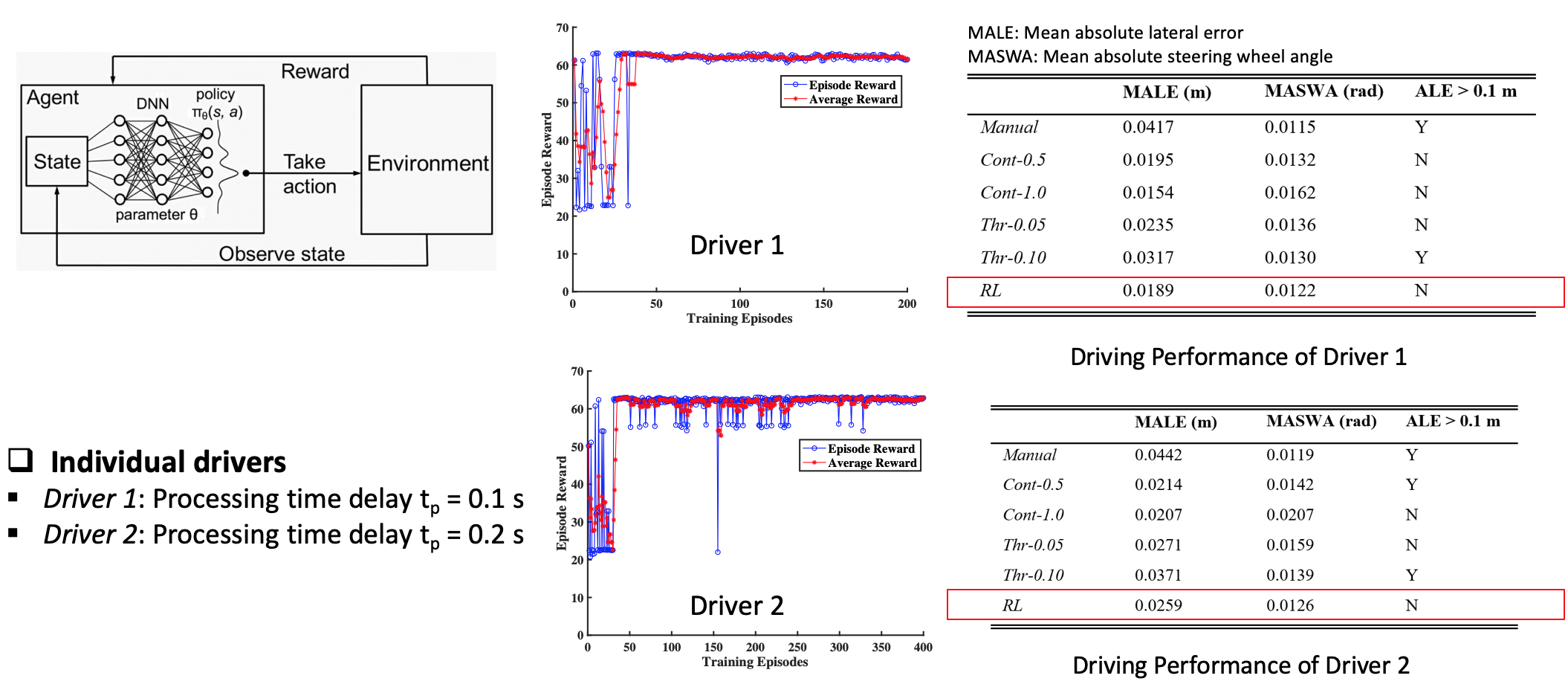
Zheng Wang*, Zhanhong Yan, and Kimihiko Nakano, “Comfort-oriented Haptic Guidance Steering via Deep Reinforcement Learning for Individualized Lane Keeping Assist”. Proc. IEEE Int. Conf. on Systems, Man, and Cybernetics, Bari, Italy, Oct. 2019, pp. 4290-4296. DOI: 10.1109/SMC.2019.8914219
Lane following performance increases or remains similar with haptic guidance and driver steering effort was reduced. The haptic guidance system is reliable, and participants tend to actively follow the strong haptic guidance on curves.
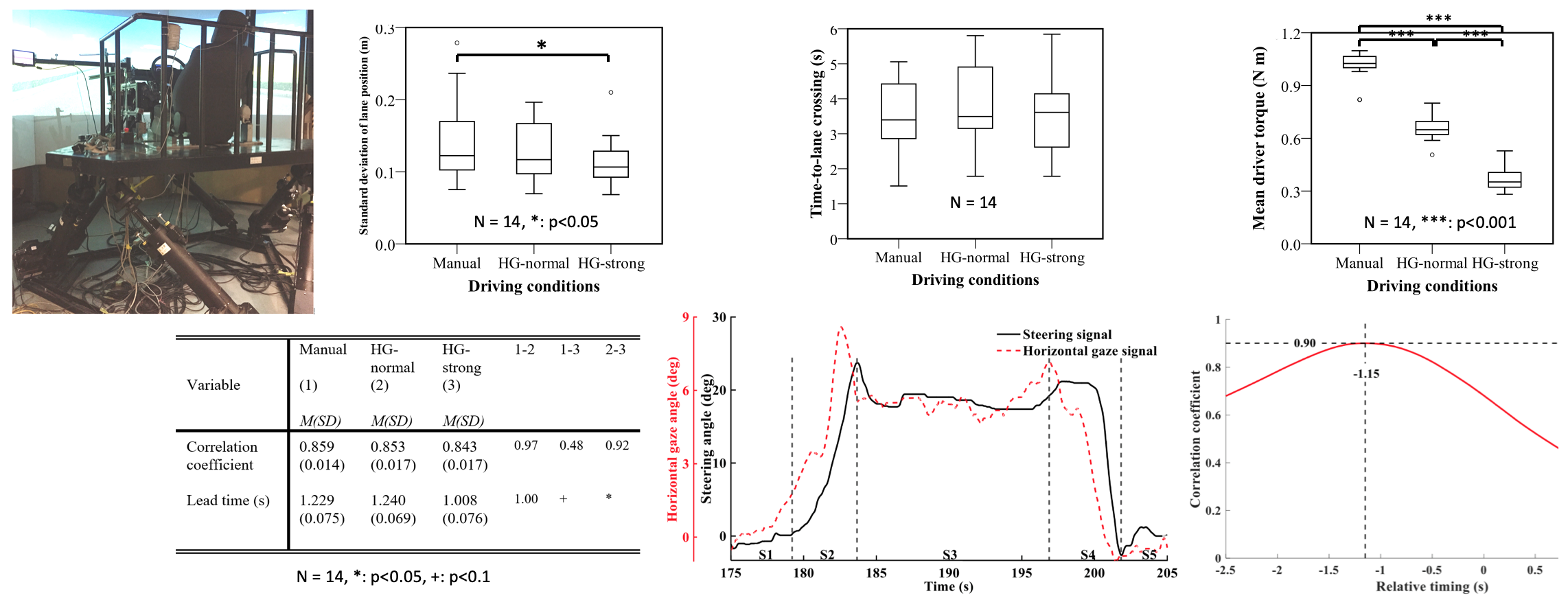
Zheng Wang*, Rencheng Zheng, Tsutomu Kaizuka, and Kimihiko Nakano, “Relationship between Gaze Behavior and Steering Performance for Driver–Automation Shared Control: A Driving Simulator Study,” IEEE Transactions on Intelligent Vehicles, vol.4, no. 1, pp. 154-166, Mar. 2019. DOI: 10.1109/TIV.2018.2886654
The model identification results showed the relationship between driver model parameters and characteristics of driver behavior , including the driver interaction with haptic guidance steering and the steering effort. Taking the degree of driver reliance on haptic guidance steering into account improved the fitness of modeling driver steering behavior. The proposed driver model in shared control driving was shown to be appropriate, as the model matched the driver’s input torque with a fitness of 68% on average.
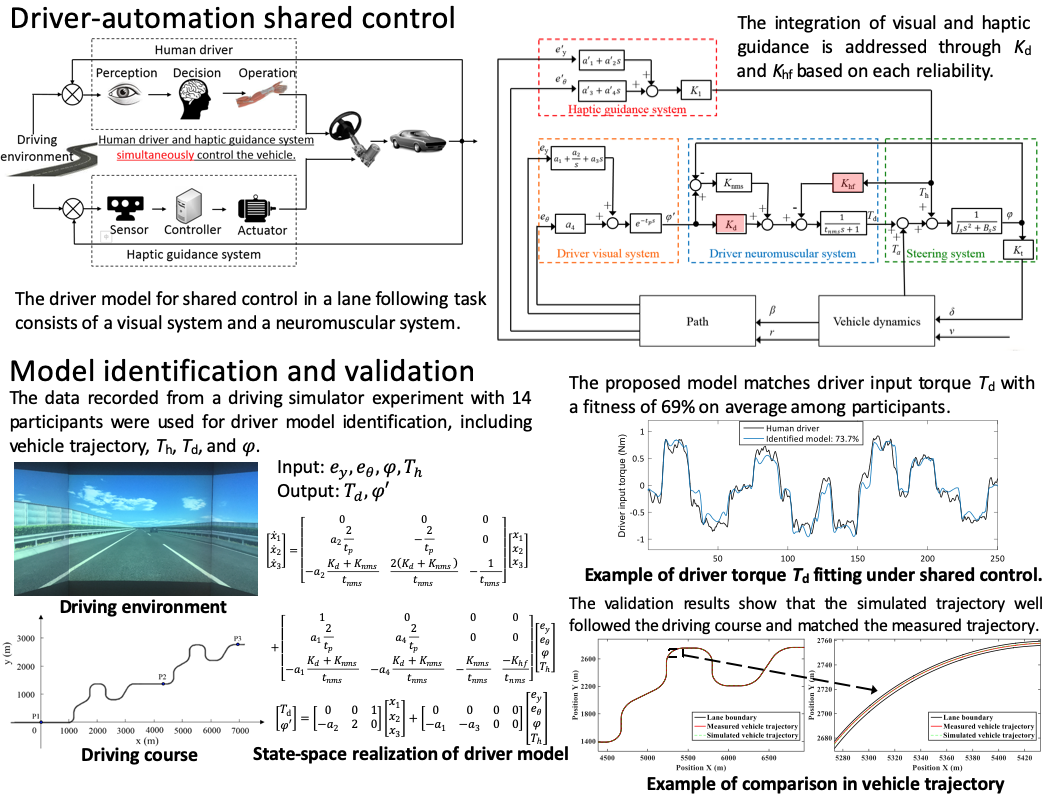
Zheng Wang*, Rencheng Zheng, Tsuromu Kaizuka, and Kimihiko Nakano, “Driver-automation shared control: Modeling driver behavior by taking account of reliance on haptic guidance steering,” Proc. IEEE Intelligent Vehicle Symposium, Changshu, China, Jun. 2018, pp. 144-149. DOI: 10.1109/IVS.2018.8500671
The decrement of lane following performance caused by visual occlusion from road ahead could be compensated by using proposed haptic guidance system, and strong haptic guidance is more effective.
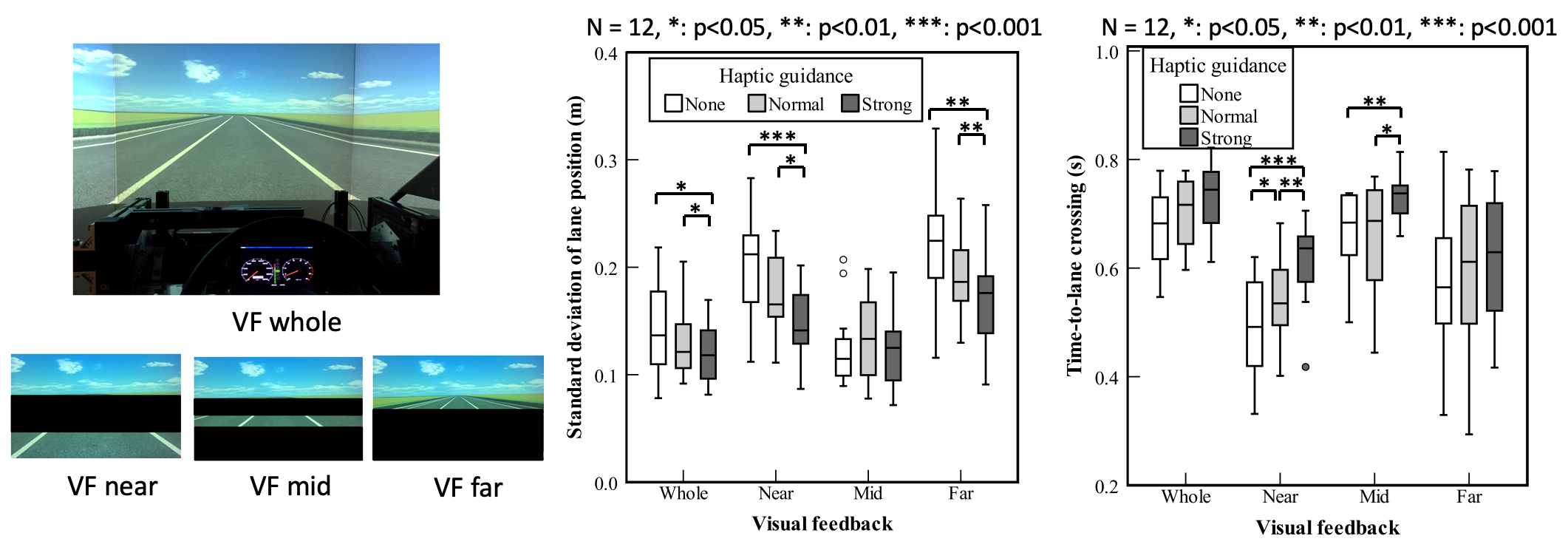
Zheng Wang*, Rencheng Zheng, Tsutomu Kaizuka, and Kimihiko Nakano, “Influence of haptic guidance on driving behaviour under degraded visual feedback conditions,” IET Intelligent Transport Systems, vol. 12, no. 6, pp. 454-462, Mar. 2018. DOI: 10.1049/iet-its.2017.0112
The decrement of lane following performance caused by declined visual attention could be compensated by haptic guidance. The active torque on the steering wheel influenced the driver state, and driver visual attention was increased.
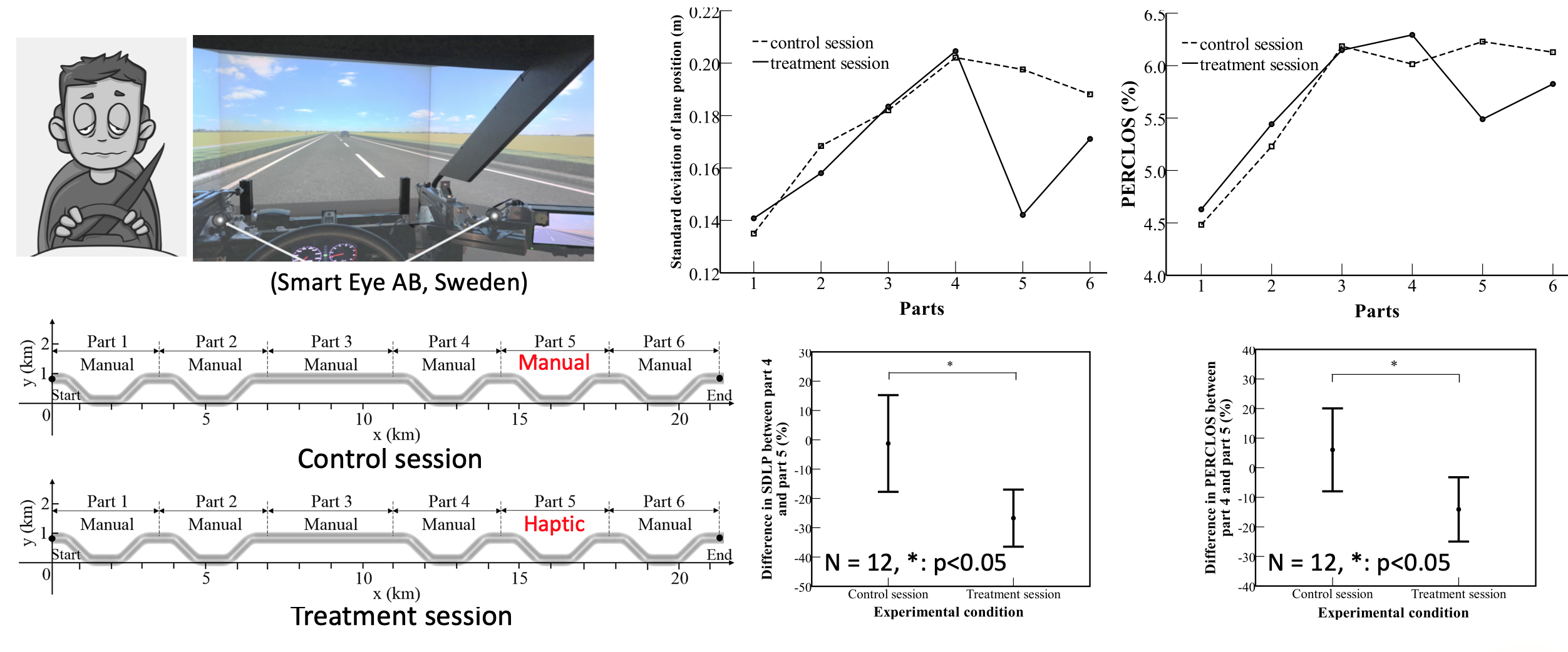
Zheng Wang*, Rencheng Zheng, Tsutomu Kaizuka, Keisuke Shimono, and Kimihiko Nakano, “The effect of a haptic guidance steering system on fatigue-related driver behavior,” IEEE Transactions on Human-Machine Systems, vol. 47, no. 5, pp. 741-748, Oct. 2017. DOI: 10.1109/THMS.2017.2693230